http://www.tautvidas.com/blog/2012/08/distance-sensing-with-ultrasonic-sensor-and-arduino/
Plugging in the sensor
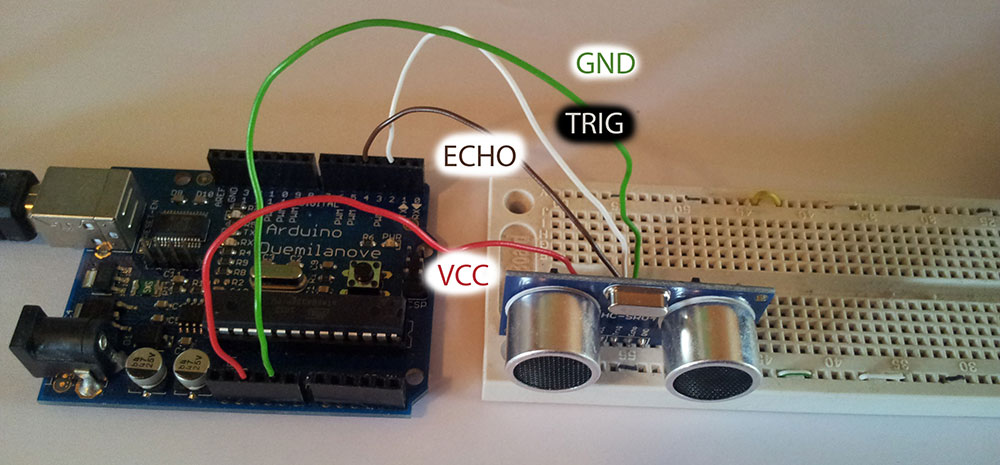
Only upon delivery have I noticed one tiny problem: the original Ping sensor had 3 pins, while my copy version has 4. So I connected the pins this way:
- VCC -> Arduino +5V pin
- GND -> Arduino GND pin
- Trig -> Arduino Digital Pin 2
- Echo -> Arduino Digital Pin 2
The Trig pin will be used to send the signal and the Echo pin will be used to listen for returning signal.
After my messy wiring the end assembly looked like this:
Getting data from the sensor
The code is fairly straightforward. I took the original example code for Ping))) sensor and just modified the OUTPUT pin to be Digital Pin 2, the INPUT pin to be Digital Pin 4 and trigger duration to 10 us.
| /* HC-SR04 Sensor |
| https://www.dealextreme.com/p/hc-sr04-ultrasonic-sensor-distance-measuring-module-133696 |
| |
| This sketch reads a HC-SR04 ultrasonic rangefinder and returns the |
| distance to the closest object in range. To do this, it sends a pulse |
| to the sensor to initiate a reading, then listens for a pulse |
| to return. The length of the returning pulse is proportional to |
| the distance of the object from the sensor. |
| |
| The circuit: |
| * VCC connection of the sensor attached to +5V |
| * GND connection of the sensor attached to ground |
| * TRIG connection of the sensor attached to digital pin 2 |
| * ECHO connection of the sensor attached to digital pin 4 |
| |
| |
| Original code for Ping))) example was created by David A. Mellis |
| Adapted for HC-SR04 by Tautvidas Sipavicius |
| |
| This example code is in the public domain. |
| */ |
| |
| |
| const int trigPin = 2; |
| const int echoPin = 4; |
| |
| void setup() { |
| // initialize serial communication: |
| Serial.begin(9600); |
| } |
| |
| void loop() |
| { |
| // establish variables for duration of the ping, |
| // and the distance result in inches and centimeters: |
| long duration, inches, cm; |
| |
| // The sensor is triggered by a HIGH pulse of 10 or more microseconds. |
| // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: |
| pinMode(trigPin, OUTPUT); |
| digitalWrite(trigPin, LOW); |
| delayMicroseconds(2); |
| digitalWrite(trigPin, HIGH); |
| delayMicroseconds(10); |
| digitalWrite(trigPin, LOW); |
| |
| // Read the signal from the sensor: a HIGH pulse whose |
| // duration is the time (in microseconds) from the sending |
| // of the ping to the reception of its echo off of an object. |
| pinMode(echoPin, INPUT); |
| duration = pulseIn(echoPin, HIGH); |
| |
| // convert the time into a distance |
| inches = microsecondsToInches(duration); |
| cm = microsecondsToCentimeters(duration); |
| |
| Serial.print(inches); |
| Serial.print("in, "); |
| Serial.print(cm); |
| Serial.print("cm"); |
| Serial.println(); |
| |
| delay(100); |
| } |
| |
| long microsecondsToInches(long microseconds) |
| { |
| // According to Parallax's datasheet for the PING))), there are |
| // 73.746 microseconds per inch (i.e. sound travels at 1130 feet per |
| // second). This gives the distance travelled by the ping, outbound |
| // and return, so we divide by 2 to get the distance of the obstacle. |
| // See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf |
| return microseconds / 74 / 2; |
| } |
| |
| long microsecondsToCentimeters(long microseconds) |
| { |
| // The speed of sound is 340 m/s or 29 microseconds per centimeter. |
| // The ping travels out and back, so to find the distance of the |
| // object we take half of the distance travelled. |
| return microseconds / 29 / 2; |
| } |
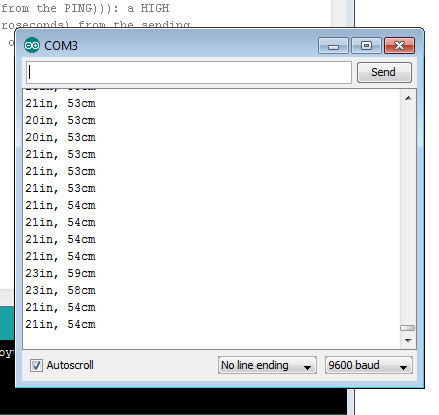
After compiling, uploading and running it, in the Serial Monitor (Tools -> Serial Monitoror Ctrl + Shift + M) the sensor was sending correct data!
After a bit of fooling around I found out that the range is approximately 2cm - 300cm. Which is not bad, but not perfect either.

No comments:
Post a Comment